在工业控制领域,PID(比例-积分-微分)控制是最经典的控制算法之一,广泛应用于温度、压力、流量等过程控制系统中。虽然现代控制理论发展迅速,但PID控制因其结构简单、鲁棒性好、易于实现等优点,仍然是工程实践中的首选方案。对于工程师而言,掌握PID参数的调试方法是必备技能。本文将围绕"调试PID常用口诀"展开深入分析,结合工程实践经验,为读者提供一套系统化的PID参数整定方法论。 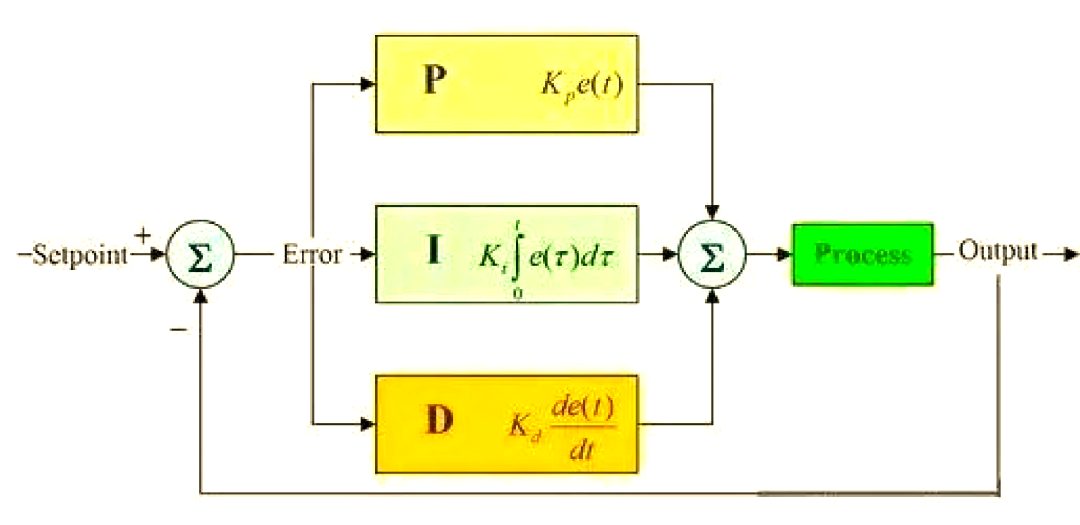
一、PID控制基本原理回顾
PID控制器由比例(P)、积分(I)和微分(D)三个环节组成,每个环节都有其独特的物理意义和控制作用。比例环节反映当前误差,决定系统的响应速度;积分环节消除稳态误差,提高控制精度;微分环节预测误差变化趋势,抑制超调。三者协同工作,共同实现对被控对象的精准控制。理解这三个参数的本质作用,是进行参数调试的基础。在实际工程中,90%以上的控制系统采用PI或PID控制,仅有约5%的场合需要更复杂的控制策略,这充分说明了PID控制在工业应用中的主导地位。
二、经典PID调试口诀解析
工程实践中流传着许多PID调试口诀,这些口诀凝聚了前辈工程师的智慧结晶。最著名的当属"先比例后积分,最后再加微分"的调试顺序,这一原则的科学性在于:比例控制是系统稳定的基础,只有在比例控制使系统基本稳定后,加入积分作用消除静差才有意义;而微分作用通常最后加入,以避免对测量噪声过于敏感。另一个广为流传的口诀是"曲线震荡很频繁,比例度盘要放大;曲线漂浮绕大弯,比例度盘往小扳",这形象地描述了比例系数对系统响应的影响——比例系数过大导致振荡,过小则响应迟缓。 "曲线偏离回复慢,积分时间再减小;曲线波动周期长,积分时间再加长"则精准概括了积分时间的调整规律。积分作用太强(积分时间太小)会引起系统振荡,太弱则无法快速消除静差。对于微分作用的调节,"动差大来波动慢,微分时间应加长"给出了明确指导,微分时间的选择应与过程的主要时间常数相当,才能有效抑制超调。
三、PID参数整定的工程实践方法
除了口诀式的经验法则,工程上还有几种系统化的PID整定方法。Ziegler-Nichols法是其中最著名的一种,它通过临界比例度法和阶跃响应法两种方式,为PID参数提供初始设定值。临界比例度法通过逐渐增大比例系数直至系统出现等幅振荡,然后根据临界增益和振荡周期计算PID参数;阶跃响应法则根据系统的阶跃响应曲线特征参数来确定PID参数。这两种方法各有优缺点:临界比例度法需要使系统处于临界振荡状态,在某些不允许振荡的场合不适用;阶跃响应法则需要获取系统的开环响应曲线。 Cohen-Coon法是基于过程模型的另一种整定方法,它针对一阶加纯滞后系统提出了参数计算公式。与Ziegler-Nichols法相比,Cohen-Coon法通常能得到更快的响应速度,但超调量可能稍大。近年来发展起来的内模控制(IMC)整定法,通过引入滤波器时间常数这个调节参数,可以在响应速度和鲁棒性之间取得更好的平衡。
四、PID调试中的常见问题与解决方案
在实际调试过程中,工程师常会遇到各种典型问题。对于系统出现持续振荡的情况,首先应该检查是否是积分作用过强导致的,可以适当增大积分时间;如果是比例系数过大引起的,则需要减小比例增益。当系统响应过于迟缓时,可能需要同时增大比例增益和减小积分时间。 测量噪声是影响PID性能的另一重要因素,特别是对微分环节影响显著。解决方法包括:在微分环节前加入低通滤波器;使用不完全微分形式的PID算法;或者在某些噪声特别大的场合,干脆不使用微分作用。对于存在显著滞后的系统,单纯PID控制可能效果不佳,这时可以考虑采用Smith预估补偿等先进控制策略。
五、现代PID调试技术发展
随着计算机技术的发展,PID调试方法也在不断创新。自整定PID技术已经广泛应用于现代控制系统中,它通过自动进行阶跃测试或闭环测试,计算出合适的PID参数。模糊PID控制将模糊逻辑与传统PID结合,能够适应更复杂的工况变化。自适应PID则能在线调整参数,应对时变系统的控制需求。 近年来兴起的基于数据的PID整定方法,如强化学习等人工智能技术,为PID调试开辟了新途径。这些方法不需要精确的过程模型,而是通过大量数据训练来优化控制性能。虽然这些先进技术在某些领域取得了成功,但传统的PID调试口诀和经验法则仍然是工程师快速解决问题的重要工具。
六、PID调试的实践建议
基于多年的工程实践,我们总结出以下几点PID调试建议:首先,调试前务必了解工艺要求和设备特性,明确控制指标;其次,安全第一,参数调整应该从小往大逐步试探;再次,记录每次参数修改后的响应曲线,通过对比分析找出最佳参数;最后,考虑环境因素变化对系统的影响,留出适当的鲁棒裕度。 对于初学者而言,掌握PID调试既需要理解控制理论,更需要积累实践经验。建议从仿真开始练习,熟悉各种典型过程(如一阶惯性、二阶振荡、纯滞后等)的PID整定特点,然后再到现场进行实际调试。记住,好的PID调试工程师不是靠记住口诀就能成就的,而是需要将理论、经验和创新思维有机结合。 随着工业4.0和智能制造的推进,PID控制技术也在与时俱进。但无论技术如何发展,理解PID控制的核心原理,掌握参数调试的基本方法,始终是控制工程师的看家本领。希望本文对PID调试口诀的系统分析,能够帮助读者在工程实践中更高效地完成控制系统的调试工作。
审核编辑 黄宇